OpenARM 品牌名字来源及定义
OpenARM -(OpenSource Artificial Robotics Machines )新一代开放AI智能机器人类机械设备单词的首字母缩写,代表由泡泡具身团队推进的系列开源开放双臂构型人造机器人类智能化机械设备的品牌称号
核心定位
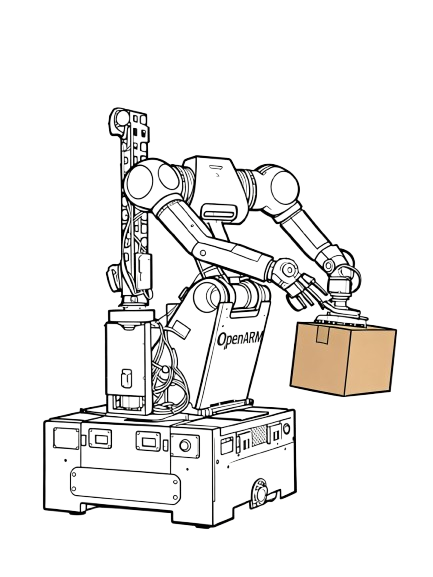
OpenARM Gen1:一款完全开源的国产人形机械臂,专为物理世界AI研究设计,可灵活部署于接触密集型真实人类生活环境。
开放生态及供应链适配能力
- 双臂硬件受海外aloha xlerobot等开源双臂研究项目启发,深度贴合中国关节电机供应链生态,全新重构硬件结构与电气选型,完全国产化知识产权。
- 软件层完全自主实现,Rust重构实现工业级高性能开源OpenARM BrainOS中间件适配,无缝兼容Debian RT/ Ubuntu RT 开源操作系统生态。
- 自主可控供应链生态,向所有中国大陆制造商、使用商及集成商及用户全面免费开放硬件生产制造与二次开发授权。
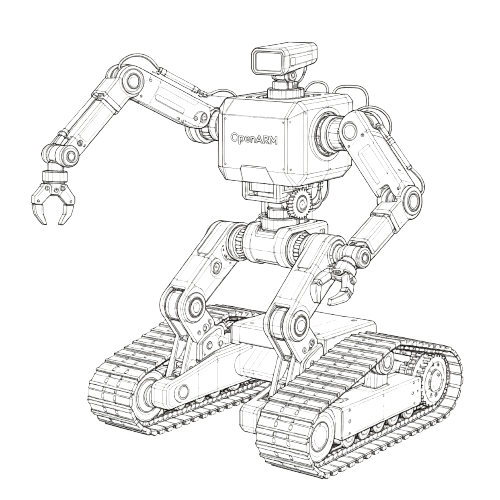
- 可灵活适配轮式、腿式等多类型底盘,全场景生态兼容,实现用户按需自定义半人形DIY机器人,打造低成本经济型垂直通用解决方案。
- 拥抱AI开源大模型生态,被Hugface开源社区旗下具身智能开发框架lerobot收录为官方指定用数据采集设备。
核心产品特性
- 完全开源:完整的CAD图纸、固件、控制代码和仿真工具全部公开可获取,支持自由二次开发。
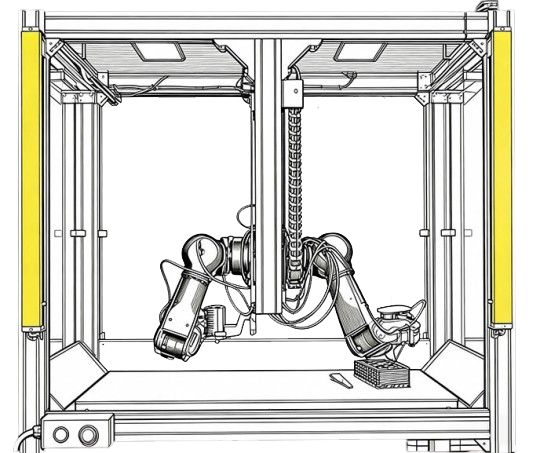
- 遥控操作:平滑的类人控制体验,配备实时重力补偿功能,操作精准流畅。
- 双边力反馈:双向力反馈技术,适用于接触密集型遥控操作和真实世界数据采集。
- 仿真支持:兼容MuJoCo和Isaac Sim,可进行真实感测试和强化学习训练。
- 灵活购买:提供DIY套件版本或完全组装就绪的成品单元,满足不同用户需求。
- 灵巧·强大·安全:兼容式可反向驱动关节,实现安全实用的以人为中心的交互体验。
技术规格
先进制造理念
我们的机械臂将精密机加工工程与现代机加工工程材料相结合,以紧凑的外形提供卓越的性能。.
- 臂展: 633mm
- 额定/峰值负载: 4.1/6Kg
- 单臂自由度: 7DOF
- 精度: ±0.5~2mm
- 控制接口: CAN-FD
- 电源: 24/48V DC
- 操作系统: OpenARM OS(DebianRT/Ubuntu+ BrainRT+Lerobot)
- 编程语言: Python,Rust ,C++